How to Overcome Challenges in Real-Time Stereo Vision with Smart Software and Hardware Solutions
Stereo vision is a powerful imaging technique that captures the three-dimensional structure of environments using two or more cameras positioned at slightly different angles by mimicking how humans perceive depth with both eyes. This technology delivers dense 3D measurements across a full field of view and excels in unstructured, dynamic environments, making it especially suitable for industrial robotics.
From bin picking to autonomous navigation, stereo vision enables a wide range of robotic applications. However, deploying stereo vision systems in real-time scenarios often face following challenges:
- High computational demands for image processing
- The need for low-latency performance
- Environmental variability such as shadows, glare, or poor lighting
- Limited processing power on embedded robotic platforms
Smart Solutions: Combining Software Efficiency with Hardware Power
To address these challenges, the right blend of optimized algorithms and purpose-built hardware is essential. For depth estimation, methods like semi-global matching (SGM) offer a good balance between speed and accuracy. Meanwhile, deep learning techniques can further refine disparity maps and enhance depth precision, especially in texture-less or occluded regions.
Noise in stereo images is another challenge. It is often introduced by lighting conditions or lens artifacts but can be minimized with edge-preserving filters such as bilateral or guided filters. These filters suppress noise while maintaining important structural details, which is crucial for high-precision robotic tasks.
However, even the best software needs the right hardware to run effectively. This is where onboard processing stereo cameras, such as the Bumblebee X, become valuable. By handling computationally intensive tasks directly on the device (e.g., stereo matching, rectification, and disparity computation), they offload the main robotic processor. This frees up system resources for AI-based decision-making, motion planning, or sensor fusion, and allowing for faster, smarter robots.
Managing Computational Load in Real-Time Systems with High Resolution Stereo Camera
Balancing real-time responsiveness with limited processing power, especially in high-precision applications like surgical navigation, is a well-known challenge in robotics. Efficient handling of sensor data is critical. Rather than overwhelming systems with raw image data, modern stereo cameras that deliver pre-processed depth maps significantly reduce bandwidth and simplify system integration.
While GPUs are undeniably powerful and widely used for general-purpose parallel computing, stereo matching is computationally intensive and can quickly consume available GPU resources, especially when other AI or control tasks are running in parallel. This is where FPGA-based processing offers a strategic advantage. By offloading vision processing to a purpose-built FPGA, platforms like Bumblebee X optimize the computational load across the system, enabling smoother, faster, and more efficient operation, particularly in embedded or resource-constrained environments.
Operating in Harsh and Unpredictable Environments
Outdoor and industrial environments pose significant challenges for stereo vision systems. Variables like direct sunlight, deep shadows, fog, and rain can all degrade image quality and compromise depth accuracy. Active sensors, such as structured light or time-of-flight (ToF) cameras, often struggle in these scenarios due to their sensitivity to ambient light interference.
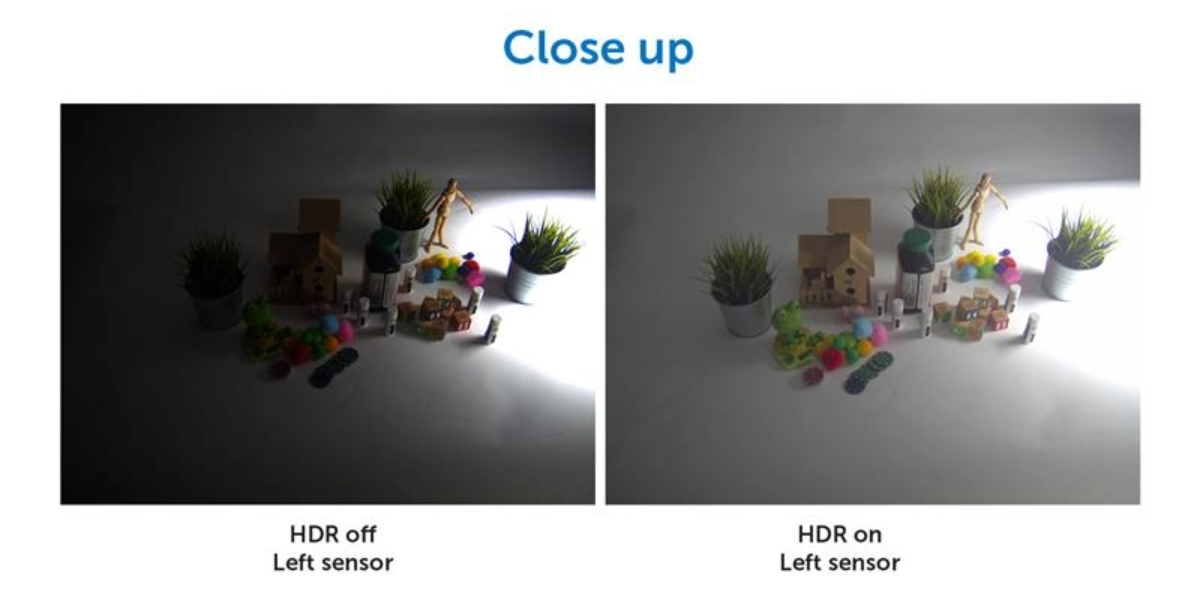
In contrast, passive stereo systems thrive in such environments because they rely solely on natural image contrast, making them inherently more robust under variable lighting. When paired with High Dynamic Range (HDR) imaging, stereo cameras can capture detail across a broad range of brightness levels, preserving critical scene information in both highlights and shadows.
For scenarios where image clarity needs further enhancement, deep learning-based denoising techniques can be applied to improve depth map quality. However, these methods are compute-intensive and require well-curated training data to be effective.
Ultimately, there is no universal formula for perfect depth perception across all applications. Each use case, whether autonomous navigation, object tracking, or high-precision pick-and-place, requires a tailored combination of technologies. However, beginning with a well-designed passive stereo system that includes HDR capability provides a strong, flexible foundation for reliable performance in dynamic and unpredictable environments.
High resolution 3D point cloud for pavement inspection
Combating Calibration Drift in Industrial Settings
Maintaining accurate stereo calibration over time is critical but challenging. In real-world deployments, factors such as vibrations, temperature changes, and physical handling can cause calibration drift, where the camera’s intrinsic and extrinsic parameters shift subtly, leading to depth inaccuracies.
In robotics, even minor misalignments can result in unstable pallet stacking, missed picks, or navigation errors. To mitigate these issues:
- Use thermally stable materials in camera designs
- Design mounts that minimize vibrations
- Schedule regular recalibration as part of preventive maintenance
Bumblebee X with over 20 years of in-house calibration infrastructure and calibration algorithms development, is engineered for industrial-grade reliability, with a rugged housing, thermally stable mechanical design, and factory-calibrated lenses that minimize calibration drift over time. This meticulous approach delivers consistent performance even in harsh environments, reduce downtime and maximizing throughput in applications like warehouse automation, palletization, and robotic guidance.
Final Thoughts
Stereo vision enables robots to perceive depth in real time, providing rich 3D data that’s critical for automation in dynamic environments. But unlocking its full potential requires more than just two cameras. High-resolution stereo imaging demands a thoughtful balance of smart software algorithms and purpose-built hardware to overcome real-world challenges.
From managing heavy computational loads to handling harsh lighting and ensuring long-term calibration accuracy, each piece of the system matters. That’s why advanced platforms like Bumblebee X are designed not just to capture images, but to solve the deeper technical challenges of stereo vision onboard.